ICD Research Talk – Xiliu Yang
March 26 | 4:00 pm - March 29 | 6:00 pm

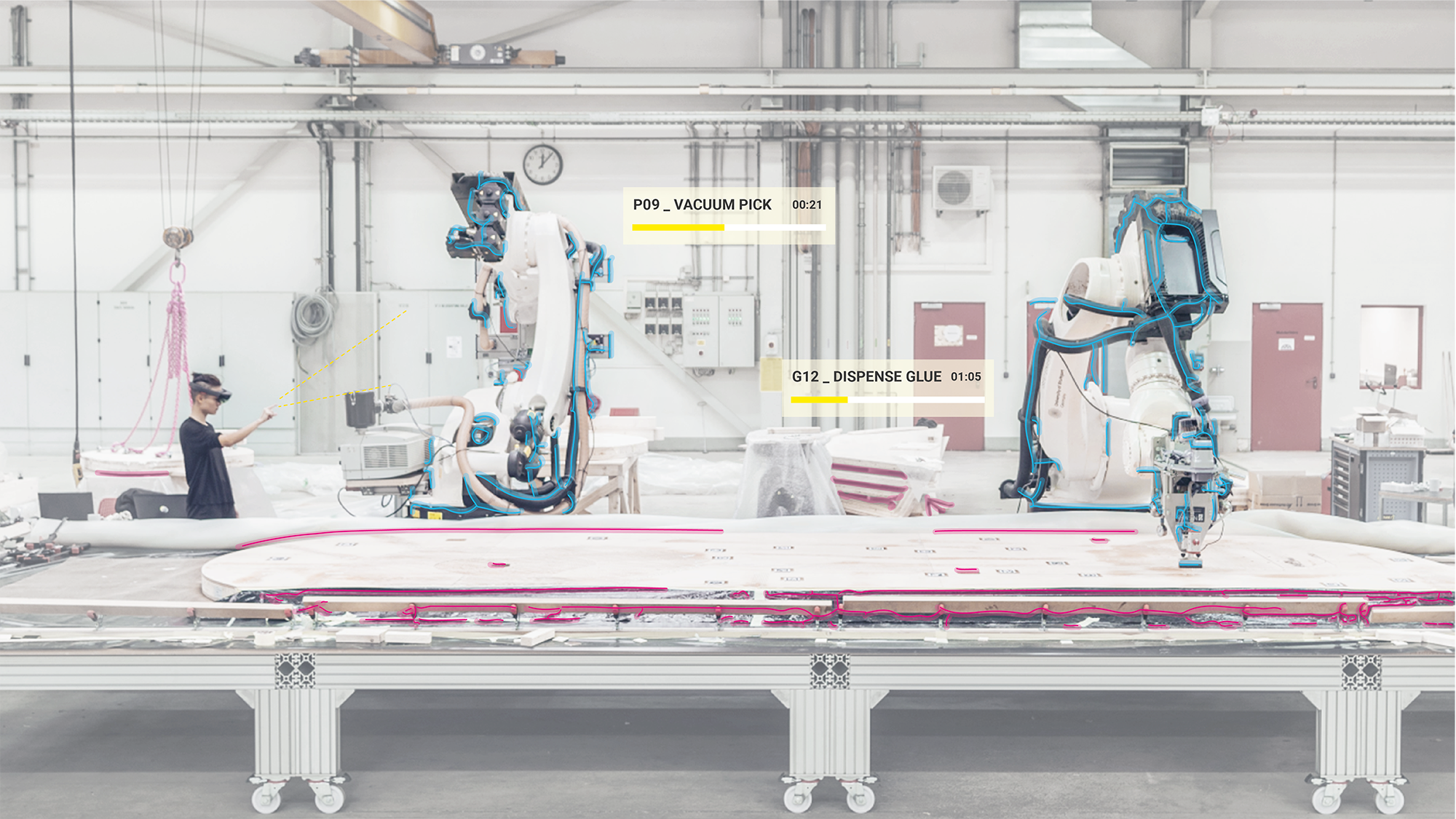
Augmented Industrial Human-robot Collaboration: A Human-centred Approach for Robotic Timber Construction with Augmented Reality
Abstract
Industrial building prefabrication is often characterised by high levels of automation, with technical processes that involve minimal interaction with the skills of craft workers on production sites. Human-robot collaboration (HRC) offers a means to integrate the complementary capabilities of humans and robots, enabling the design of collaborative processes that are both more flexible and socially sustainable. However, adopting HRC in building prefabrication presents a number of challenges, including the use of high-payload robots that are not designed for close interaction, and the need to interface with construction workers who bring extensive tacit knowledge but are typically untrained in robot control.
This dissertation presents a conceptual and technical framework for HRC in timber prefabrication, leveraging head-mounted augmented reality displays (AR HMDs) for information delivery and interaction. It proposes methods to design, implement, and evaluate these AR-based HRC workflows, grounded in a human-centred design approach that involved trained carpenters throughout the research process. These developments are accompanied by empirical studies that shed light on craftspeople-technology interactions in timber construction, providing insights for future design and deployment of these technologies in the field.
Situated in the context of human-centric production systems and fabrication co-design, this thesis contributes an integrative and human-centred perspective on AR-based human-robot collaboration in timber construction. By integrating human-, system-, and design-oriented considerations, it formulates a holistic design approach to advancing the integration of humans and robots in future construction practices.